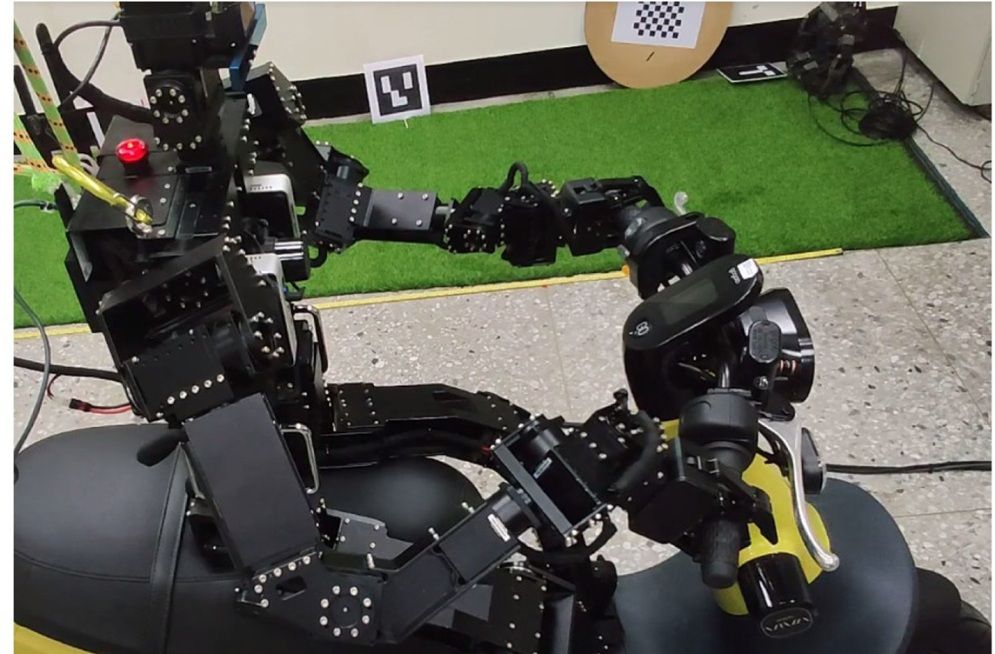
▲台師大團隊透過深度學習,讓人形機器人成功挑戰騎機車。(圖/台師大提供)
記者許敏溶/台北報導
人形機器人會走路、跳舞不稀奇。台師大研究團隊建立人形機器人與機車3D模型,再進行大規模演算法測試與強化學習訓練,成功將「虛擬學習」轉化為「真實技能」,完成深度強化學習的人形機器人,不僅執行轉向動作,還在現實環境中保持平衡與完成基礎路徑追蹤,為未來通用型機器人的發展開啟新的可能性。
AI(人工智慧)帶動科技產業快速變化,輝達(NVIDIA)執行長黃仁勳今年5月在台演說時提到,透過數位方式培養機器人能力,下一波浪潮將是實體AI,更提到未來通用機器人將開啟下一個兆級美元產業。
面對機器人,台師大電機工程學系教授包傑奇(Jacky Baltes)和助理教授薩義德(Saeed Saeedvand)組成的研究團隊,投入深度強化學習,讓人形機器人成功挑戰騎機車,而不僅止於走路和跳舞。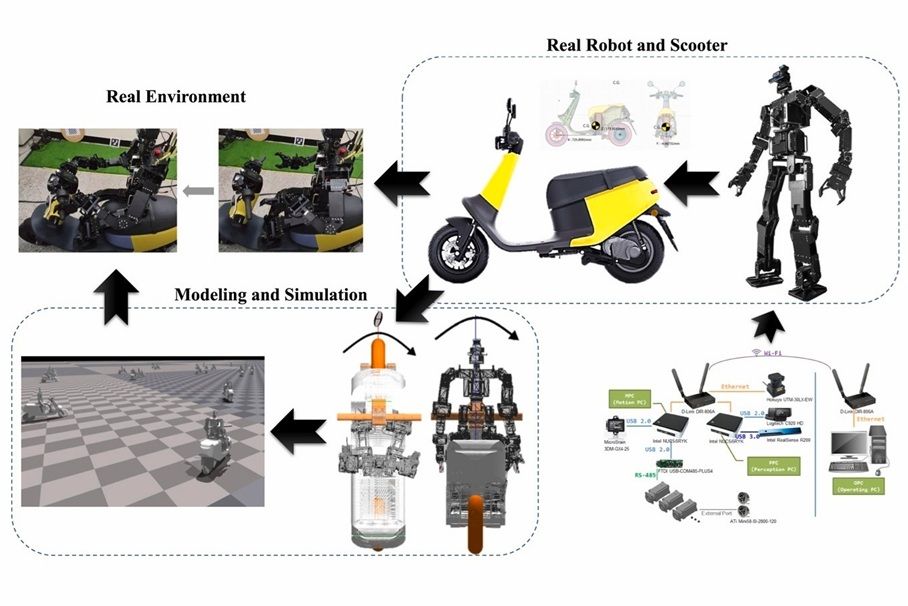
▲台師大團隊透過深度學習,讓人形機器人成功挑戰騎機車。(圖/台師大提供)
台師大團隊表示,民眾騎機車似乎很簡單,但對機器人而言卻是極具挑戰任務,需要透過高度精確控制,才能讓機器人在靜止或低速時保持平衡,而過去雖有工業機器人或自動駕駛系統的重大進展,但能騎乘雙輪車的人形機器人研究卻十分稀少。
為降低成本並加快實驗進度,台師大研究團隊首先在GPU高效能模擬平台 NVIDIA Isaac Gym上進行訓練,建立人形機器人與機車的3D模型,再進行大規模演算法測試與強化學習訓練。經過模擬驗證後,團隊將控制策略移植到實體機器人與市售電動機車上。結果顯示機器人不僅能執行轉向動作,還在現實環境中保持平衡與完成基礎路徑追蹤,成功將「虛擬學習」轉化為「真實技能」。
研究團隊表示,過去人形機器人已展現滑雪、溜冰、攀岩甚至表演魔術等多元技能,如今再加上騎乘機車能力,大幅拓展其應用潛力,而讓機器人逐步學會更多技能,將是邁向「通用型機器人」關鍵。目前嘗試將這套系統導入大型實體測試場域,這項研究不僅在技術上具突破性,更展現人形機器人發展的無限可能。

▲台師大團隊透過深度學習,讓人形機器人成功挑戰騎機車。(圖/台師大提供)
讀者迴響